4 Les
moteurs d'aiguillage. Il existe principalement
des moteurs à bobines (solénoïde) et des moteurs
lents.
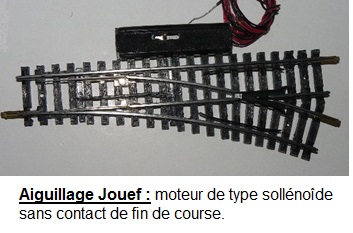
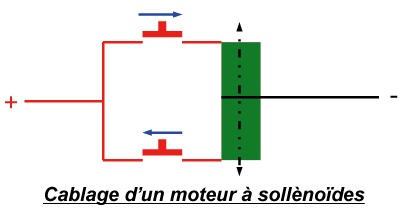
4.1 Les moteurs à solénoïdes
se commandent avec boutons poussoirs. Leur action est instantanée.
Certains sont fournis avec des contacts fin de course qui coupent
l'alimentation de la bobine une fois les lames déplacées;
c'est une sécurité si vous avez la main lourde avec
le poussoir la bobine ne peut pas griller.
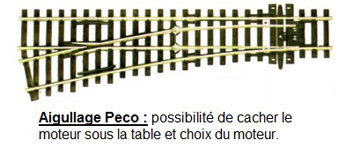
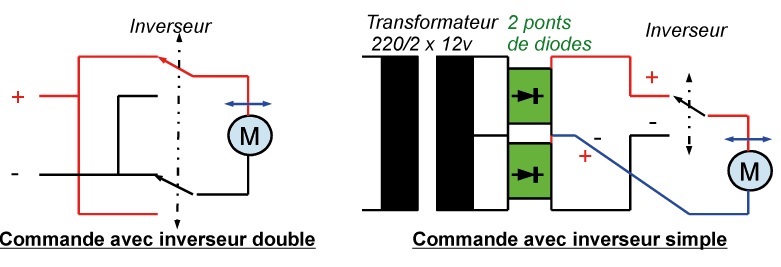
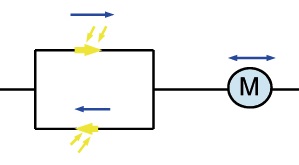
4.2 Les moteurs lents. Ce sont des
moteurs rotatifs dont l'action n'est pas instantanée. On
les commande avec des interrupteurs inverseurs. Il y a plusieurs
méthodes de câblage.
4.3 Les différents moteurs lents. Il existe
plusieurs marques. Pour ma part je vais décrire les deux
que j'utilise.
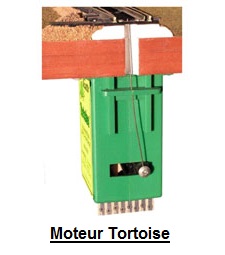
4.3.1 Les moteurs Tortoise. Ils sont très
répandus, et pas bruyants. Mécaniquement ils s'installent
très facilement sous l'aiguillage dans l'axe de la voie.
Leur mécanisme n'ayant pas de verrouillage ils doivent
être constamment alimentés pour que les lames de
l'aiguille plaquent bien ce qui implique dans les grands réseaux
une alimentation et un câblage en conséquence. Ces
moteurs sont fournis avec deux contacts auxiliaires utiles pour
des automatismes. Attention ces moteurs
détestent le fer à souder trop chaud.
| En insérant deux Leds
inversées en série avec votre moteur vous pouvez
répéter sans aucun contact supplémentaire
la position de l'aiguille sur votre T.C.O. . |
 |
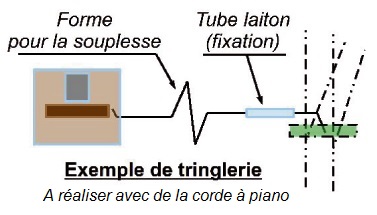
| 4.3.2 Les moteurs Lemaco. Ils
sont un peu plus bruyants que les Tortoises. Mécaniquement
ils s'installent sous la table mais un système de tringlerie
est à prévoir. Ces moteurs sont équipés
de 2 diodes et de contacts de fin de course, si bien qu'une
fois les lames en place il n'y a aucune consommation. Par
le système à vis sans fin il y a blocage mécanique.
Ces moteurs sont fournis avec deux contacts auxiliaires (possibilité
de passer à 4 en option) dont un peut être utilisé
pour répéter la position sur le T.C.O. . Attention
ces moteurs détestent le fer à souder trop chaud. |
|